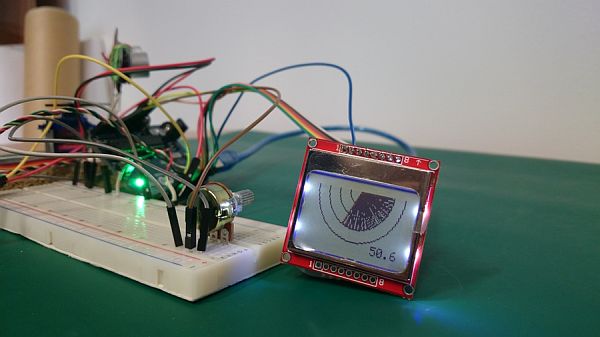
 Radar wykonuje obrót o 180 stopni i mierzy odległość do napotkanych przedmiotów. Wyniki przedstawiane są w formie prostego wykresu na ekranie z regulowaną skalą (potencjometr liniowy). Maksymalny widoczny zakres (ostatni półokrąg na ekranie) wypisywany jest w postaci liczby w prawym dolnym rogu ekranu. Pozwala to na ograniczenie zakresu wykresu w przypadku, gdy radar ustawiony jest blisko przeszkód. W przypadku gdy przeszkody są daleko - mamy możliwość zwiększenia zakresu.
W realizacji powyższego projektu należało zapoznać/uporać się z:
Radar wykonuje obrót o 180 stopni i mierzy odległość do napotkanych przedmiotów. Wyniki przedstawiane są w formie prostego wykresu na ekranie z regulowaną skalą (potencjometr liniowy). Maksymalny widoczny zakres (ostatni półokrąg na ekranie) wypisywany jest w postaci liczby w prawym dolnym rogu ekranu. Pozwala to na ograniczenie zakresu wykresu w przypadku, gdy radar ustawiony jest blisko przeszkód. W przypadku gdy przeszkody są daleko - mamy możliwość zwiększenia zakresu.
W realizacji powyższego projektu należało zapoznać/uporać się z:
 Kolejna edycja "Robotyki dla licealistów" rusza w kwietniu pod patronatem programu "Talenty XXI wieku" ( III-cia edycja) organizowanym przez Centrum Kształcenia Ustawicznego w Białymstoku.
Zapraszamy!
Kolejna edycja "Robotyki dla licealistów" rusza w kwietniu pod patronatem programu "Talenty XXI wieku" ( III-cia edycja) organizowanym przez Centrum Kształcenia Ustawicznego w Białymstoku.
Zapraszamy!
W ramach naszego serwisu www stosujemy pliki cookies zapisywane na urządzeniu użytkownika w celu dostosowania zachowania serwisu do indywidualnych preferencji użytkownika oraz w celach statystycznych. Użytkownik ma możliwość samodzielnej zmiany ustawień dotyczących cookies w swojej przeglądarce internetowej. Więcej informacji można znaleźć w Polityce Prywatności Uniwersytetu w Białymstoku. Korzystając ze strony wyrażają Państwo zgodę na używanie plików cookies, zgodnie z ustawieniami przeglądarki.
